新闻动态
新闻动态对运营期的桥梁而言,由于自身的不确定性和随机性,车辆荷载的评估具有至关重要的意义。然而,现有的基于计算机视觉的识别算法在精准识别车辆轮载位置方面仍存在一些不足。现有方法通常将车辆视为集中荷载,并以边界框中的某些特殊点作为集中荷载作用点的位置,这种较为粗略的假设会降低识别的准确性,乃至影响后期的分析评估。此外,车辆轮载作用点的运动是一个复杂的刚体运动,若要得到准确的轮载运动轨迹,则需要对视觉系统直接采集到的数据进行进一步优化,这涉及到受约束的多变量非线性过程的最优估计,现有研究中没有对车辆轮载作用点优化过程的深入探索,也没有提出轨迹优化的解决方案。
为解决上述问题,同济大学土木工程学院刘超副教授团队提出了基于多深度学习模型集成的车辆轮载时空分布识别算法。该研究进展发表在ADVANCED ENGINEERING INFORMATICS,论文标题为“Keypoint detection-based and multi-deep learning model integrated method for identifying vehicle axle load spatial-temporal distribution”。
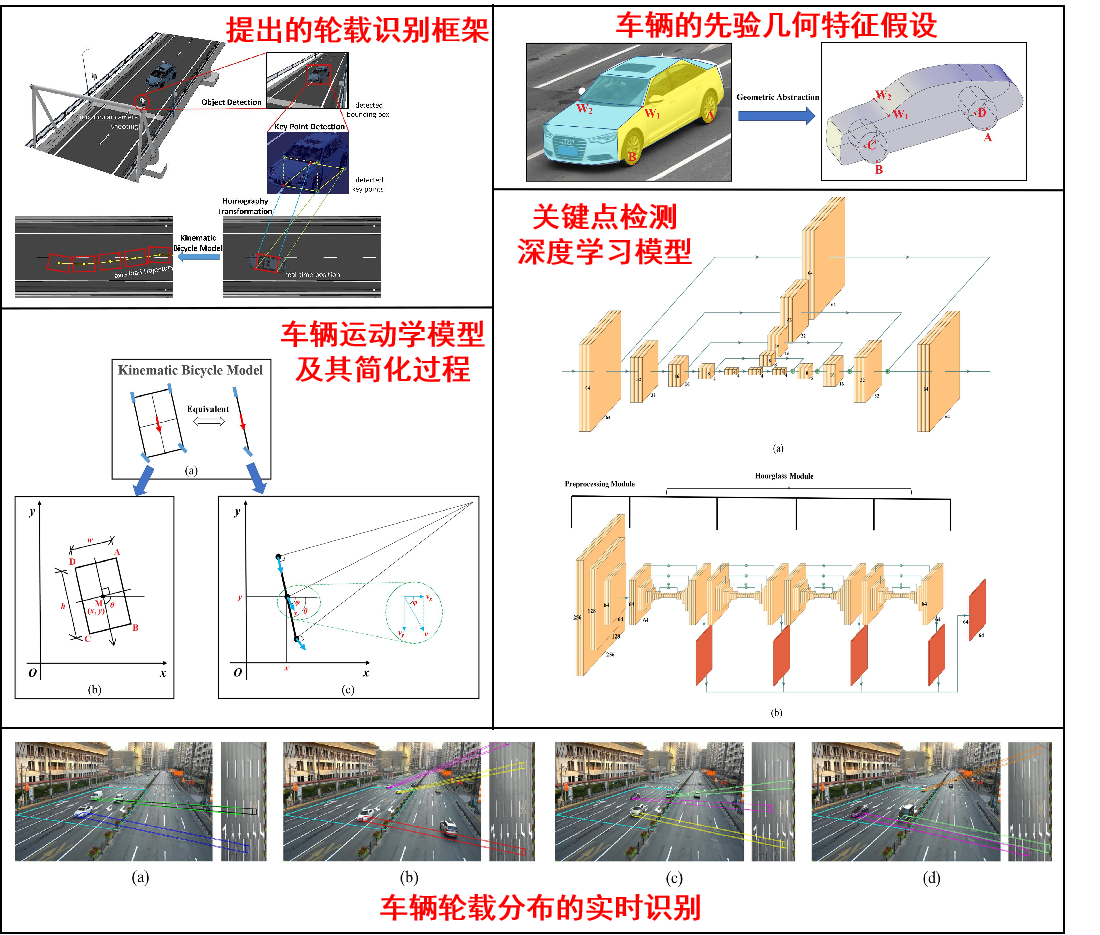
提出的识别框架通过目标检测和关键点检测集成的深度学习模型定位监控画面中的车辆关键点,并以此间接推断出轮载作用点,然后使用卡尔曼滤波器优化了轮载矩形中心点的轨迹,根据最大似然法估计轮载矩形的尺寸,最后通过建立车辆运动的运动学模型推算出车辆偏航角的最优估计。提出的方法仅依赖一个简单的先验假设,就建立了一个集成多个深度学习模型的单目识别框架,并结合最优估计、统计学和运动学理论,解析地解决了轨迹优化过程中带约束的七变量非线性过程最优估计问题,从而在保持算法精度的同时为复杂非线性过程的优化提供了可行的解决方案。
原文链接:https://www.sciencedirect.com/science/article/pii/S1474034624003367